Inhalt
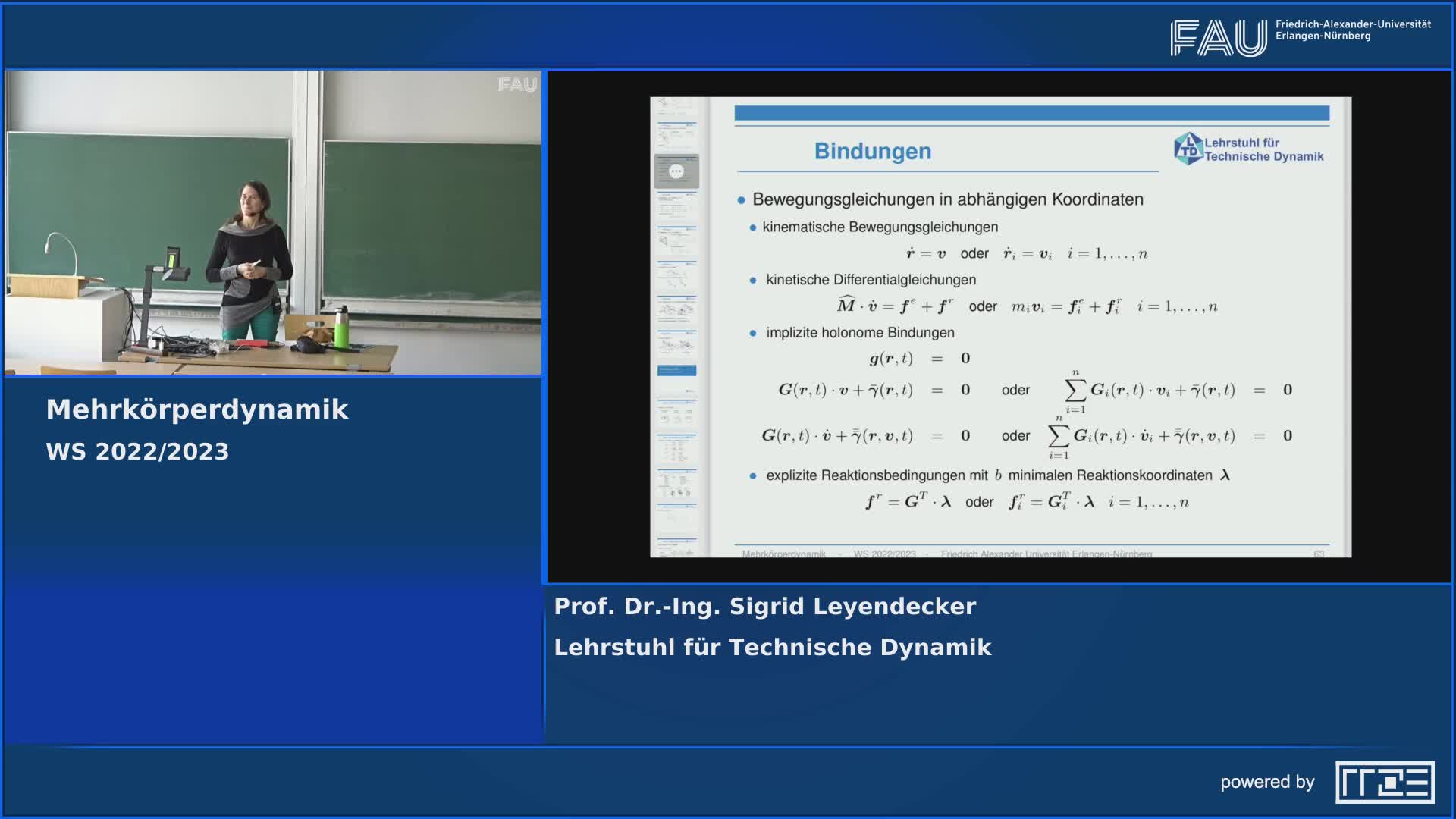
- Bewegungsgleichungen für Systeme gekoppelter starrer Körper
-
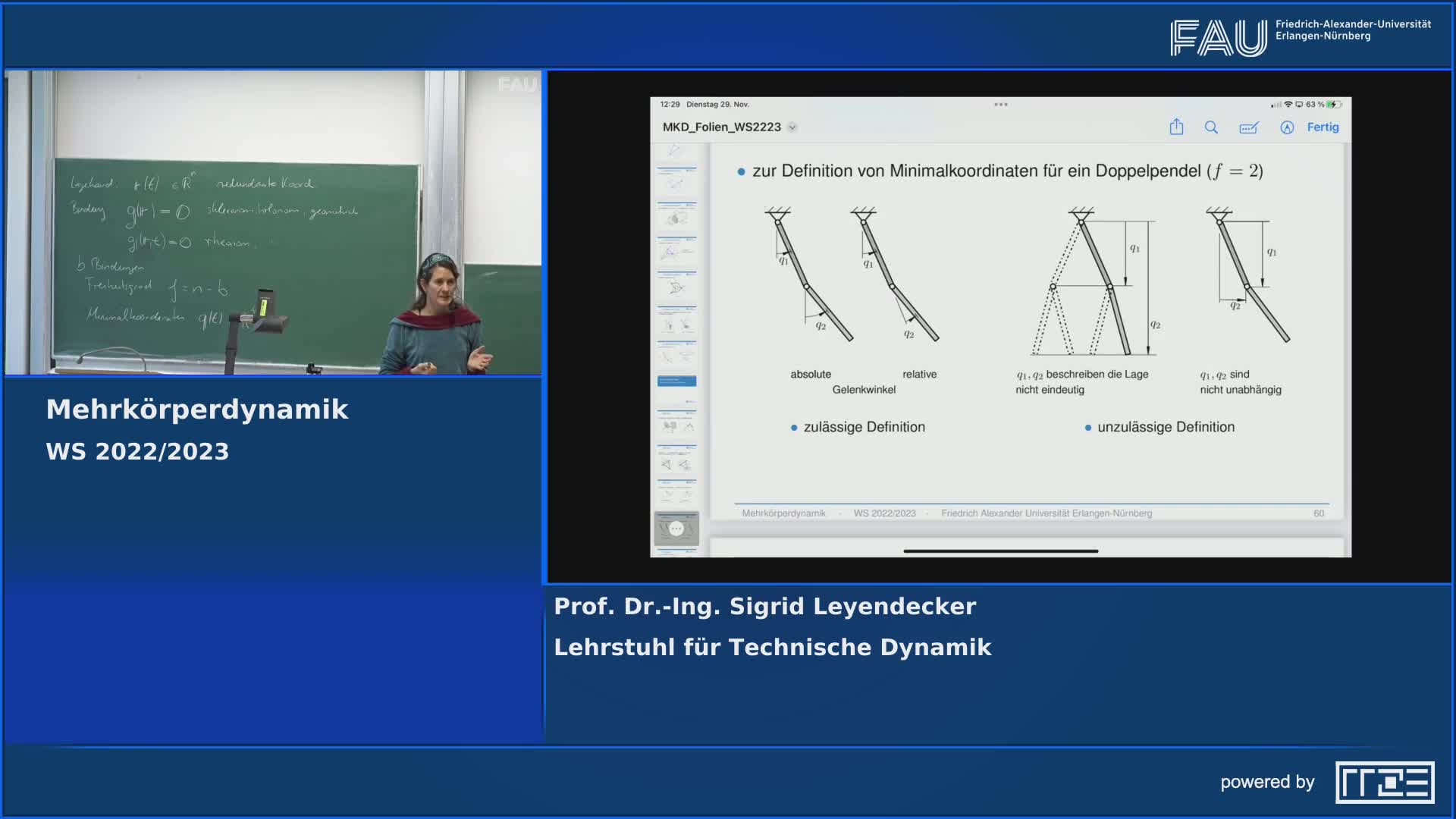
Parametrisierung in generalisierten Koordinaten und in redundanten Koordinaten
-
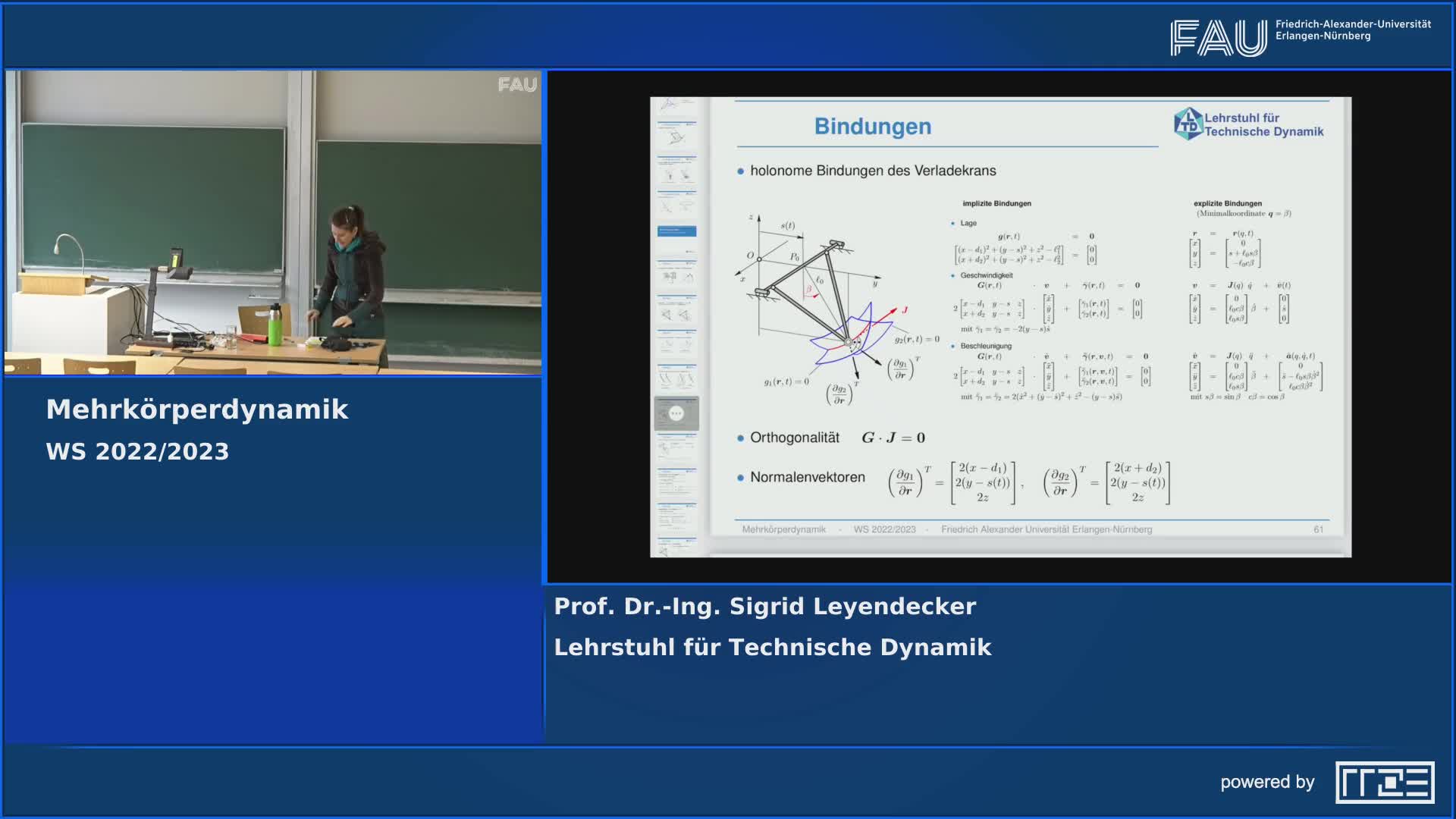
holonome und nicht-holonome Zwangsbedingungen
-
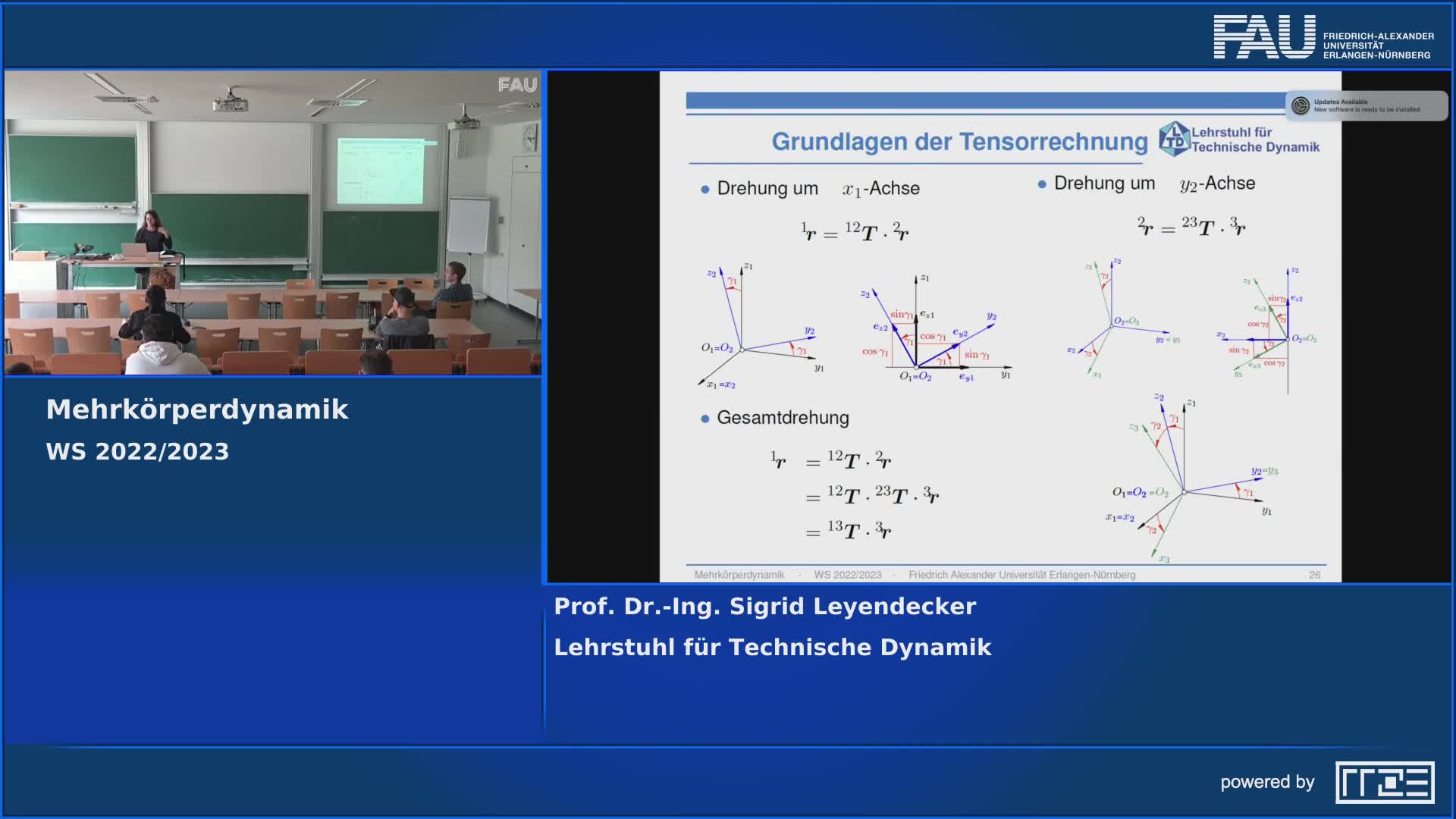
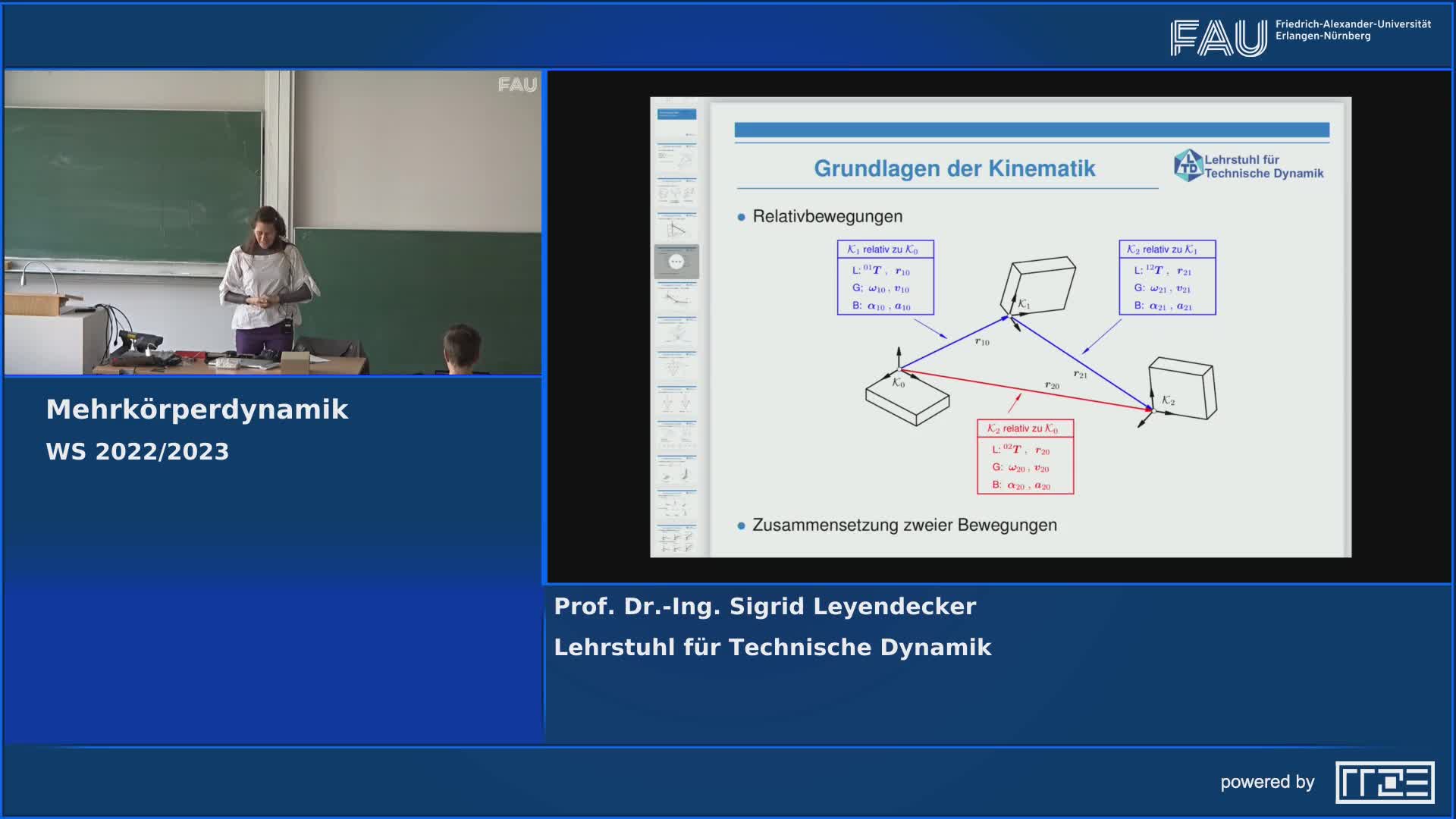
drei-dimensionale Rotationen
-
Topologie von Mehrkörpersystemen
-
Steuerung in Gelenken
-
numerische Lösungsverfahren für nicht-lineare Bewegungsgleichungen mit Zwangsbedingungen
Empfohlene Literatur
- Schiehlen, Eberhard: Technische Dynamik. Teubner, 2004
- Woernle: Mehrkörpersysteme. Eine Einführung in die Kinematik und Dynamik von Systemen starrer Körper. Springer, 2011